Description
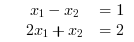
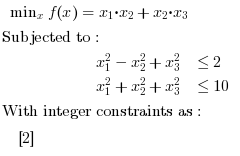
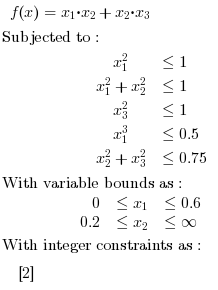
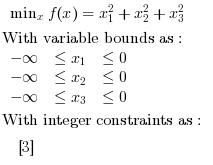
Search the minimum of a mixed integer constrained optimization problem specified by : Find the minimum of f(x) such that

intfmincon calls Bonmin, an optimization library written in C++, to solve the Constrained Optimization problem.
Options
The options allow the user to set various parameters of the Optimization problem. The syntax for the options is given by:options= list("IntegerTolerance", [---], "MaxNodes",[---], "MaxIter", [---], "AllowableGap",[---] "CpuTime", [---],"gradobj", "off", "hessian", "off" );
- IntegerTolerance : A Scalar, a number with that value of an integer is considered integer.
- MaxNodes : A Scalar, containing the maximum number of nodes that the solver should search.
- CpuTime : A scalar, specifying the maximum amount of CPU Time in seconds that the solver should take.
- AllowableGap : A scalar, that specifies the gap between the computed solution and the the objective value of the best known solution stop, at which the tree search can be stopped.
- MaxIter : A scalar, specifying the maximum number of iterations that the solver should take.
- gradobj : A string, to turn on or off the user supplied objective gradient.
- hessian : A scalar, to turn on or off the user supplied objective hessian.
options = list('integertolerance',1d-06,'maxnodes',2147483647,'cputime',1d10,'allowablegap',0,'maxiter',2147483647,'gradobj',"off",'hessian',"off")
The exitflag allows to know the status of the optimization which is given back by Ipopt.
- 0 : Optimal Solution Found
- 1 : InFeasible Solution.
- 2 : Objective Function is Continuous Unbounded.
- 3 : Limit Exceeded.
- 4 : User Interrupt.
- 5 : MINLP Error.
For more details on exitflag, see the Bonmin documentation which can be found on http://www.coin-or.org/Bonmin