Description
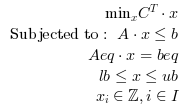
Search the minimum or maximum of a constrained mixed integer linear programming optimization problem specified by :
The routine calls SYMPHONY written in C by gateway files for the actual computation.
The status allows to know the status of the optimization which is given back by Ipopt.
- status=227 : Optimal Solution Found
- status=228 : Maximum CPU Time exceeded.
- status=229 : Maximum Number of Node Limit Exceeded.
- status=230 : Maximum Number of Iterations Limit Exceeded.
For more details on status see the symphony documentation, go to http://www.coin-or.org/SYMPHONY/man-5.6/
The output data structure contains detailed informations about the optimization process. It has type "struct" and contains the following fields.
- output.iterations: The number of iterations performed during the search

