Description
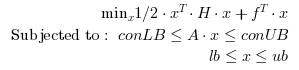
Search the minimum of a constrained linear quadratic optimization problem specified by :
The routine calls Ipopt for solving the quadratic problem, Ipopt is a library written in C++.
The exitflag allows to know the status of the optimization which is given back by Ipopt.
- exitflag=0 : Optimal Solution Found
- exitflag=1 : Maximum Number of Iterations Exceeded. Output may not be optimal.
- exitflag=2 : Maximum CPU Time exceeded. Output may not be optimal.
- exitflag=3 : Stop at Tiny Step.
- exitflag=4 : Solved To Acceptable Level.
- exitflag=5 : Converged to a point of local infeasibility.
For more details on exitflag see the ipopt documentation, go to http://www.coin-or.org/Ipopt/documentation/
The output data structure contains detailed informations about the optimization process. It has type "struct" and contains the following fields.
- output.iterations: The number of iterations performed during the search
- output.constrviolation: The max-norm of the constraint violation.
The lambda data structure contains the Lagrange multipliers at the end of optimization. In the current version the values are returned only when the the solution is optimal. It has type "struct" and contains the following fields.
- lambda.lower: The Lagrange multipliers for the lower bound constraints.
- lambda.upper: The Lagrange multipliers for the upper bound constraints.
- lambda.eqlin: The Lagrange multipliers for the linear equality constraints.
- lambda.ineqlin: The Lagrange multipliers for the linear inequality constraints.

