Description
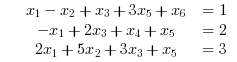
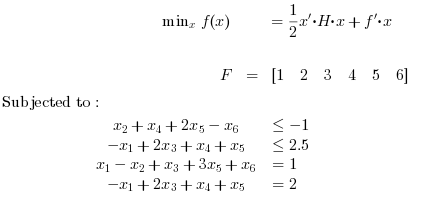
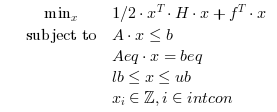
Search the minimum of a constrained linear quadratic optimization problem specified by :
intqpipopt calls Bonmin, a library written in C++ to solve the quadratic problem.
The exitflag allows to know the status of the optimization which is given back by Ipopt.
- 0 : Optimal Solution Found
- 1 : InFeasible Solution.
- 2 : Objective Function is Continuous Unbounded.
- 3 : Limit Exceeded.
- 4 : User Interrupt.
- 5 : MINLP Error.
For more details on exitflag, see the Bonmin documentation which can be found on http://www.coin-or.org/Bonmin
The output data structure contains detailed information about the optimization process. It is of type "struct" and contains the following fields.
- output.constrviolation: The max-norm of the constraint violation.