Description
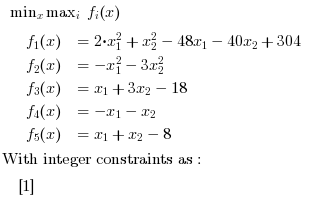
intfminimax minimizes the worst-case (largest) value of a set of multivariable functions, starting at an initial estimate. This is generally referred to as the minimax problem.

max-min problems can also be solved with intfminimax, using the identity

Currently, intfminimax calls intfmincon, which uses the bonmin algorithm, an optimization library in C++.
Options
The options allow the user to set various parameters of the Optimization problem. The syntax for the options is given by:
options= list("IntegerTolerance", [---], "MaxNodes",[---], "MaxIter", [---], "AllowableGap",[---] "CpuTime", [---],"gradobj", "off", "hessian", "off" );
- IntegerTolerance : A Scalar, a number with that value of an integer is considered integer.
- MaxNodes : A Scalar, containing the maximum number of nodes that the solver should search.
- CpuTime : A scalar, specifying the maximum amount of CPU Time in seconds that the solver should take.
- AllowableGap : A scalar, that specifies the gap between the computed solution and the the objective value of the best known solution stop, at which the tree search can be stopped.
- MaxIter : A scalar, specifying the maximum number of iterations that the solver should take.
- gradobj : A string, to turn on or off the user supplied objective gradient.
- hessian : A scalar, to turn on or off the user supplied objective hessian.
options = list('integertolerance',1d-06,'maxnodes',2147483647,'cputime',1d10,'allowablegap',0,'maxiter',2147483647,'gradobj',"off",'hessian',"off")
The objective function must have header :
F = fun(x) |  |  |
By default, the gradient options for intfminimax are turned off and and fmincon does the gradient opproximation of minmaxObjfun. In case the GradObj option is off and GradCon option is on, intfminimax approximates minmaxObjfun gradient using the numderivative toolbox.
If we can provide exact gradients, we should do so since it improves the convergence speed of the optimization algorithm.
The exitflag allows to know the status of the optimization which is given back by Bonmin.
- 0 : Optimal Solution Found
- 1 : InFeasible Solution.
- 2 : Objective Function is Continuous Unbounded.
- 3 : Limit Exceeded.
- 4 : User Interrupt.
- 5 : MINLP Error.
For more details on exitflag, see the Bonmin documentation which can be found on http://www.coin-or.org/Bonmin